
【元記事】北海道大学が水中を泳ぐ1ミリ以下の分子ロボットの創出に成功、光をエネルギー源に屈曲運動で自立遊泳(TechCrunch Japan 2021年12月03日 by tetsuokanai)
【関連記事】世界初の生体ロボット、自己複製可能な世界初の生きている機械「ゼノボットMk3」
◇
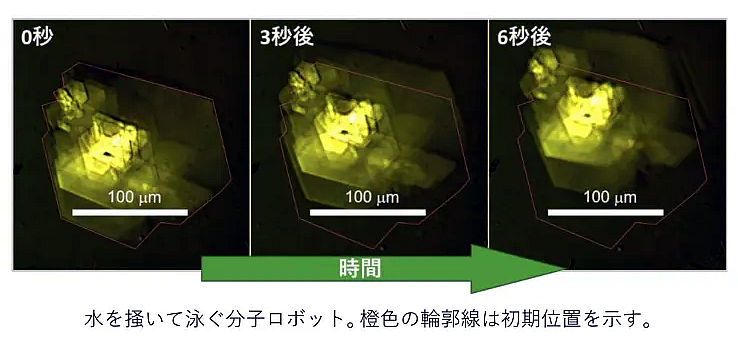
北海道大学は11月29日、動物のように体を動かして水中を泳ぐ、大きさが1mm以下という微小な分子ロボットを作り出すことに成功したと発表した。変形を繰り返す、水中を泳ぐという分子ロボットの2つの大きな課題を克服した、世界初の研究成果とのこと。
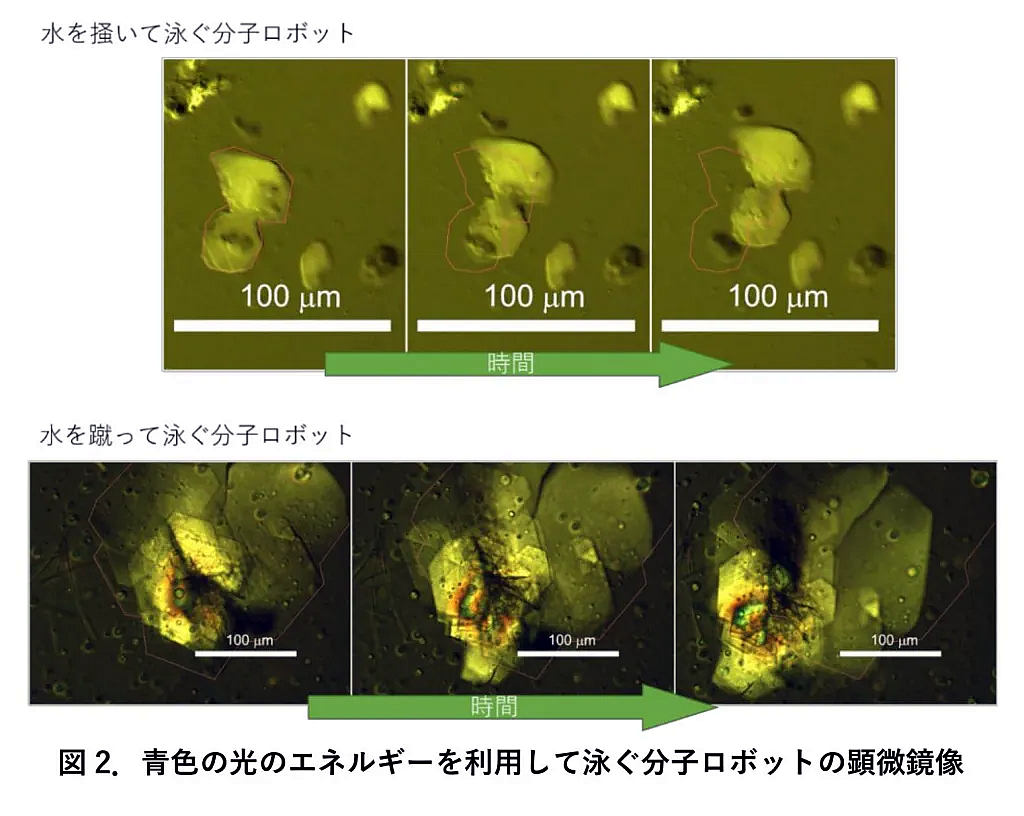
北海道大学大学院理学研究院の景山義之助教らの研究グループが今回作り出したのは、青色の光をエネルギー源として体を動かし、体の一部をヒレのように使って水中を泳ぐという分子ロボット。化学的に合成した分子「アゾベンゼン」とオレイン酸を混合した結晶からできている。大きさは、縦が数十µm(マイクロメートル)、横が数百µm、高さが1µm(1µmは、0.001mm)。同グループは、2016年、すでに「「屈曲を自ずから繰り返す分子ロボット」を発表している。今回の課題はそれを「泳がせる」ことだった。
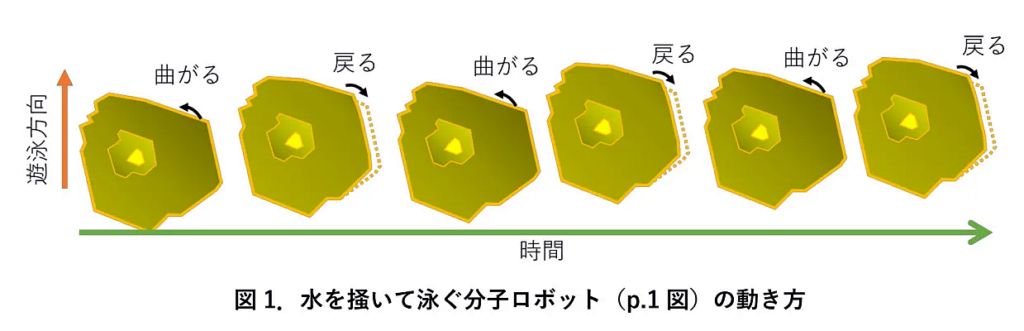
分子ロボットのサイズの世界では、人が泳ぐときとはまったく異なる力が作用する。いちばんの要素は水の粘性。人間のように体重を活かして勢いをつけて進むことができない。体を動かして移動できても、元の形に戻すと、位置も元の場所に戻ってしまう。ボートをこぐときに、オールを水中から出さずに前後に動かしているようなものだと研究グループでは表現している。そのため、微小なものは屈伸運動では泳げないというのが定説になっていた。
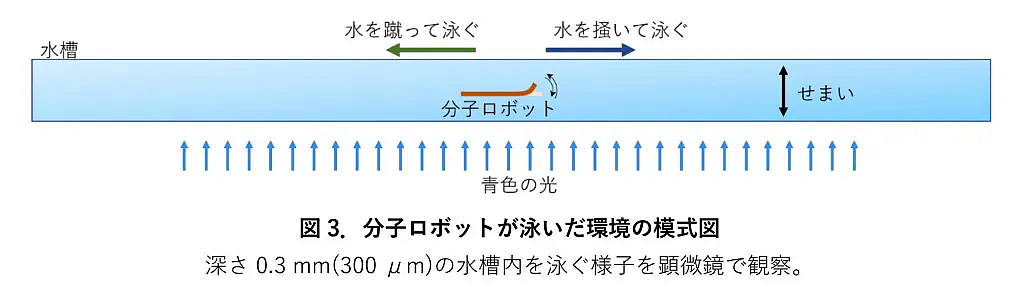
同グループは、遊泳方向を決める因子、遊泳速度と遊泳距離を決める因子について力学計算を行った。その結果、分子ロボットの上下運動が制約される平面状の狭い空間なら泳げることが示された。今回作られた分子ロボットには、ヒレが前にある「犬かき型」とヒレが後ろにある「バタ足型」の2種類がある。遊泳速度は、秒速10µmほど(1秒間に体長の1/10ほど進む)。速いものでは秒速15µm(時速500mに相当)と、定説を覆す結果となった。
今回の成果は、血管などの狭い空間を移動できる自動運転型分子ロボットの開発につながるほか、小さな生命体の狭い空間での動き方に関する理解が深まる可能性もあるということだ。
コメント
[…] 【関連記事】北海道大学が水中を泳ぐ1ミリ以下の分子ロボットの創出に成功、光をエネルギー源に屈曲運動で自立遊泳 […]