サイボーグ・ゴキブリが災害救助の救世主になる?(Newsweek 2022年09月13日(火)11時25分)
<なぜロボットではなくサイボーグ昆虫なのか? 利点と開発の歴史を紹介する>
日本では近年、災害救助での動物やロボットの活用が注目されています。行方不明者の探索に犬の優れた嗅覚を利用したり、ロボットを人間には立ち入れない狭くて危険な場所に差し向けたりすることは、一刻を争う救命救助に大きな力となると期待されています。
理化学研究所(理研)などの国際研究チームは、超薄型の太陽電池を装着し無線で人が操作できる「サイボーグ昆虫」を開発しました。将来は災害地での活躍も視野に入れています。研究成果は、5日付の国際科学誌「npj Flexible Electronics」オンライン版に掲載されました。
生物とロボットの能力の「良いとこ取り」をしたサイボーグ昆虫の利点と歴史を概観します。
高出力と昆虫の動きの自由度の両立に成功
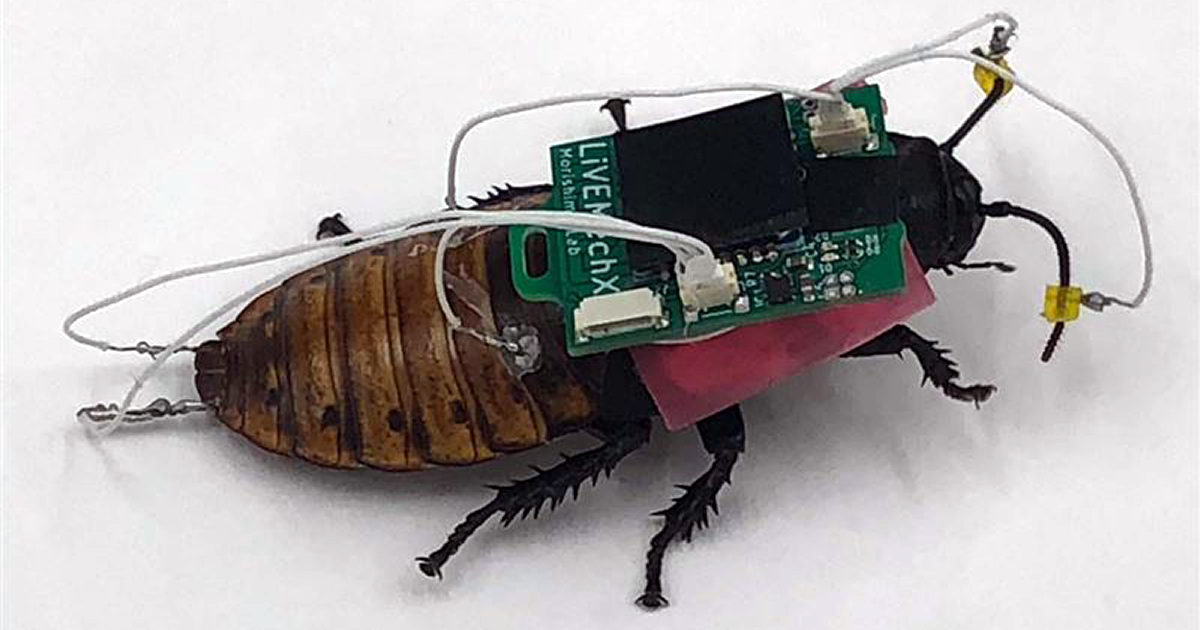
本研究でサイボーグ昆虫に選ばれたのは、マダガスカルゴキブリです。①体長約6センチと大きい、②翅(はね)がなくて飛ばない、③環境に対する耐性が比較的高いことから選ばれました。サイズが大きいためサイボーグ化のための装置を無理なく装着でき、飛ばないため行動制御がしやすい特徴があります。さらに飼育環境下では5年程度の寿命を持ち、過酷な環境でも生きられることから、サイボーグ昆虫の研究には広く使われています。
理研チームは、マダガスカルゴキブリの背に薄くて柔らかい太陽電池を装着。胸部に付けられた無線装置を介して、尻の部分にある尾葉という突起に電流を通して動きを操ることに成功しました。サイボーグ昆虫に装備されている太陽電池は、光を当てれば何度でも充電できます。実験では、30分間の充電で約2分間の操作ができました。
サイボーグ昆虫の制御を無線で長時間行ってデータを取得する場合、10ミリワット以上の発電装置(太陽電池など)を昆虫に装着させる必要があります。けれど、装置が重くなったり活動の邪魔になったりすれば、昆虫の運動能力は低下し本来の動きは損なわれます。これまでは運動能力を保ちつつ、必要電力を賄う発電装置の開発が困難でした。
今回、研究チームは厚さ4マイクロメートルでフィルム状の超薄型太陽電池を開発し、軽量化と動きの自由度を保つことに成功しました。さらに、昆虫は動くたびに腹部が変形するので、動きを阻害しないために太陽電池を固定する際に接着剤を塗る部分と塗らない部分を交互に作る「飛び石構造」を採用しました。その結果、最大17.2ミリワットの出力と、昆虫の動きの自由度を両立できました。
充電さえすれば、昆虫の寿命が続く限り、人が入ることのできない特殊な環境でも長時間の活動が可能なため、瓦礫の下敷きになった被災者の捜索や、化学汚染が予想される場所でのモニタリングなどへの活用が期待されます。研究チームは「将来的には、小型カメラを装着したり複数のサイボーグ昆虫を一斉に用いたりすることで、人命探索の迅速化にも役立てたい」と語っています。
現段階では、サイボーグ・ゴキブリで成功した遠隔操作は左右に動かすのみです。制御が効かなくなって逃げ出したら、災害救助活動中に天敵の蜘蛛やヤモリなどに食べられてしまったら、冬になって活動が鈍ったらどうするかなど、克服すべき課題は数多くあります。けれど、研究チームは、今後はカブトムシなどの他の昆虫にも応用できないかと検討しているそうです。
なぜロボットではダメ?
サイボーグ昆虫の研究は2000年代以降に活発になったテーマで、今や世界中で研究されています。主に①災害対応、②環境やセキュリティ目的の監視、③犯罪者の追尾などの目的が掲げられています。
ロボットのほうが効率よく開発できそうなのに、なぜわざわざ昆虫と機械の融合を試みるのでしょうか。それは、サイボーグ昆虫は、すべてが機械でできているロボットよりも圧倒的に燃費がよく、長時間の活動ができるからです。
日本における災害対応ロボットの開発は、阪神淡路大震災で通路の確保の難しさや二次災害のおそれから、人が踏み込めずに探索できない場所が多かったことの反省から進展しました。東日本大震災で事故が発生した福島第一原発の建屋には、遠隔操作できるロボット「Quince」が派遣され、情報収集に活躍しました。
けれど、Quinceの大きさは全長665ミリ×全幅480ミリ×高さ225ミリで重さも約30キロあります。大型犬くらいのサイズがあるため、地震や土砂崩れ災害で瓦礫の隙間を探査することは困難です。小型の災害対応ロボットも開発されていますが、搭載される小型電池では活動時間が数分間になってしまうことも少なくありません。
その点、生きている昆虫を使えば人が入れない狭い場所にも行け、危険や障害物はプログラムしなくても自力で回避してくれます。遠隔操作やデータ通信のための動力を搭載する必要はありますが、昆虫本体は飲まず食わずでも数日間生きられるものもいます。
今回の理研チームの研究に参加するシンガポール南洋理工大の佐藤裕崇准教授は、サイボーグ昆虫の研究に十数年前から取り組んでいます。米カリフォルニア大バークリー校時代の09年には、体長約6センチの「オオツノカナブン」に電極を付けて遠隔操作で意図する方向に飛ばすことに成功しました。
同じ頃、米ミシガン大やコーネル大ではサイボーグ蛾による飛行実験を実施。一方、マサチューセッツ工科大は「電力ではなく、昆虫の生体エネルギー(化学エネルギー)を使って動く超小型ラジコン」の開発を進めます。
日本では大阪大の森島圭祐教授が、蛾の幼虫の筋肉を動力にしたマイクロロボットや、昆虫の体液を利用した発電装置を開発しています。マイクロロボットは、糖をエネルギー源にしたロボットが血管に入ってエネルギーを取り込みながら人体を探索できる可能性が示唆されます。発電装置は、昆虫が生きている限り動き続ける点が注目を集めています。
東大先端科学技術研究センターの神崎亮平教授は、カイコガのオスがメスのフェロモンの匂いの方向に進む性質を使った匂い探索ロボットを開発しています。ロボットだけでは難しい匂いセンサや匂いの探索を、カイコガの脳や触覚と機械を融合させることによって達成しました。
今回の理研の研究は、地面での捜索や情報収集に特化したサイボーグ・ゴキブリの可能性が示されたものでした。今は嫌われ者のゴキブリですが、将来は災害救助に役立つ益虫として認識される世界になるかもしれませんね。

